
How to handle one-way streets¶
Both Dijkstra and A-Star algorithms have the ability to compute the cost for both sides of an edge of a graph, which can be very useful when finding a route with a road network that has one-way streets.
This little example will illustrate how this is done. The sample data was created using OpenJump and then was saved in a PostGIS database where pgRouting was also installed.
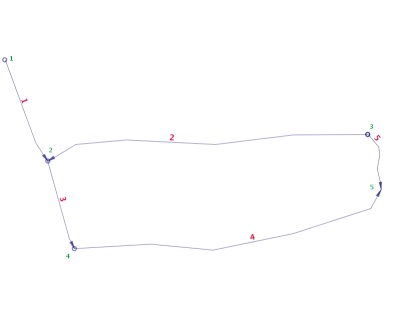
The graph looks like this; note that edge !#2 was digitized from right to left, unlike most of the edges which was digitized left to right. This was done to simulate a one way street.
When computing for the cost of both sides of the edge, a reverse_cost field is necessary to be passed to the routing algorithm.
Initially, both the cost and the reverse_cost values set to the length of the edge.
routing=# UPDATE rtest SET cost=length(the_geom), rcost=length(the_geom);
UPDATE 5
Then, to increase the reverse_cost of edge !#2, a value of 1,000,000 was added to the value of the reverse_cost field.
routing=# UPDATE rtest SET rcost=rcost + 1000000 WHERE gid = 2;
routing=# SELECT gid,cost,rcost,source,target FROM rtest ORDER BY gid;
gid | cost | rcost | source | target
----+------------------+---------------------+--------+--------
1 | 90.4777391240398 | 90.4777391240398 | 1 | 2
2 | 266.663211021467 | 000266.663211021467 | 3 | 2
3 | 74.7975644284963 | 74.7975644284963 | 2 | 4
4 | 264.887335603738 | 264.887335603738 | 4 | 5
5 | 49.0618009646755 | 49.0618009646755 | 3 | 5
(5 rows)
The last parameter of both Dijkstra and A-Star algorithms determines whether the reverse cost will also be computed when finding a route through the graph.
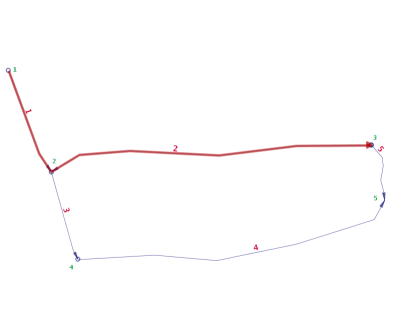
When set to false, both algorithms will search using only the cost parameter, which in this case is just the length of each edge. For this example, we’ll find a route between node #1 until node #3.
routing=# SELECT * FROM shortest_path_astar('SELECT gid AS id,source::int4,
target::int4, cost::double precision, rcost::double precision AS reverse_cost,
x1,y1,x2,y2 FROM rtest',1,3,false,false);
vertex_id | edge_id | cost
-----------+---------+------------------
1 | 1 | 90.4777391240398
2 | 2 | 266.663211021467
3 | -1 | 0
(3 rows)
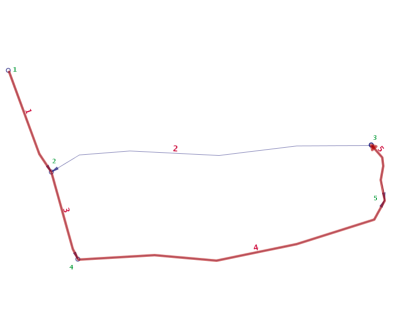
Now, if the reverse parameter is set to true, the algorithms will use the reverse_cost and see that node 2 of edge #2 has a very hight cost and will look for another route.
routing=# SELECT * FROM shortest_path_astar('SELECT gid AS id, source::int4,
target::int4, cost::double precision, rcost::double precision AS reverse_cost,
x1,y1,x2,y2 FROM rtest',1,3,false,true);
vertex_id | edge_id | cost
----------+---------+------------------
1 | 1 | 90.4777391240398
2 | 3 | 74.7975644284963
4 | 4 | 264.887335603738
5 | 5 | 49.0618009646755
3 | -1 | 0
(5 rows)
Although having the ability to compute the cost of both sides of the edge is a very nifty feature, it come with a heavy price since it will impact performance quite a bit and thus should be used only when it is really necessary.
routing=# EXPLAIN ANALYZE SELECT * FROM shortest_path_astar('SELECT gid
AS id,source::int4, target::int4, cost::double precision, rcost::double
precision AS reverse_cost,x1,y1,x2,y2 FROM rtest',1,3,false,false);
QUERY PLAN
--------------------------------------------------------------------------------
Function Scan on shortest_path_astar (cost=0.00..12.50 rows=1000 width=16)
(actual time=0.954..0.958 rows=3 loops=1) Total runtime: 1.020 ms
(2 rows)
routing=# EXPLAIN ANALYZE SELECT * FROM shortest_path_astar('SELECT gid
AS id, source::int4, target::int4, cost::double precision, rcost::double
precision AS reverse_cost,x1,y1,x2,y2 FROM rtest',1,3,false,true);
QUERY PLAN
--------------------------------------------------------------------------------
Function Scan on shortest_path_astar (cost=0.00..12.50 rows=1000 width=16)
(actual time=11.088..11.093 rows=5 loops=1) Total runtime: 11.155 ms(2 rows)
the end.